在汽車電子軟件開發(fā)中,統(tǒng)一診斷服務(wù)(UDS)是實(shí)現(xiàn)車輛診斷、刷寫和監(jiān)控的核心協(xié)議。Communication Control服務(wù)(服務(wù)標(biāo)識(shí)符0x28)是UDS協(xié)議中一個(gè)關(guān)鍵的功能控制服務(wù),它允許診斷儀動(dòng)態(tài)地管理車載網(wǎng)絡(luò)中各ECU的通信行為。本文將結(jié)合AUTOSAR基礎(chǔ)軟件(BSW)的實(shí)踐,深入詳解0x28服務(wù)的功能、配置及與底層通信棧的集成。
1. Communication Control服務(wù)(0x28)概述
Communication Control服務(wù)的主要目的是控制ECU內(nèi)部非診斷通信的發(fā)送與接收。例如,在ECU刷寫(編程會(huì)話)期間,為了確保診斷通信的帶寬和穩(wěn)定性,通常需要暫時(shí)禁止應(yīng)用報(bào)文(如CAN信號(hào))的發(fā)送。該服務(wù)允許診斷儀在特定診斷會(huì)話(如擴(kuò)展會(huì)話)下,對(duì)ECU的通信通道(如CAN、LIN、FlexRay等網(wǎng)絡(luò))進(jìn)行啟停控制。
2. 服務(wù)請(qǐng)求與響應(yīng)格式
- 請(qǐng)求格式:28 + SubFunction + ControlType + [CommunicationType]
- SubFunction(子功能):高字節(jié)位表示抑制肯定響應(yīng)位(SuppressPosRspMsgIndicationBit),低7位定義控制模式(如0x00=使能Rx和Tx,0x01=使能Rx但禁用Tx,0x02=禁用Rx但使能Tx,0x03=禁用Rx和Tx)。
- ControlType(控制類型):指定控制是應(yīng)用于所有通信(0x00)還是特定網(wǎng)絡(luò)(如0x01=CAN, 0x02=CAN FD, 0x03=以太網(wǎng)等)。
- CommunicationType(通信類型,可選):當(dāng)ControlType指定特定網(wǎng)絡(luò)時(shí),此參數(shù)進(jìn)一步細(xì)化控制對(duì)象(如具體的通道ID或報(bào)文ID)。
- 肯定響應(yīng)格式:68 + SubFunction(回顯請(qǐng)求中的子功能)
- 否定響應(yīng)碼(NRC):常見的有0x12(子功能不支持)、0x13(報(bào)文長(zhǎng)度或格式錯(cuò)誤)、0x22(條件不滿足,如不在擴(kuò)展會(huì)話中)、0x31(請(qǐng)求超出范圍,如不支持的通道)。
3. AUTOSAR基礎(chǔ)軟件中的配置詳解
在AUTOSAR方法論中,0x28服務(wù)的實(shí)現(xiàn)和配置主要涉及診斷通信管理器(Dcm)、通信管理器(ComM)以及底層通信驅(qū)動(dòng)(如CanIf、EthIf)。
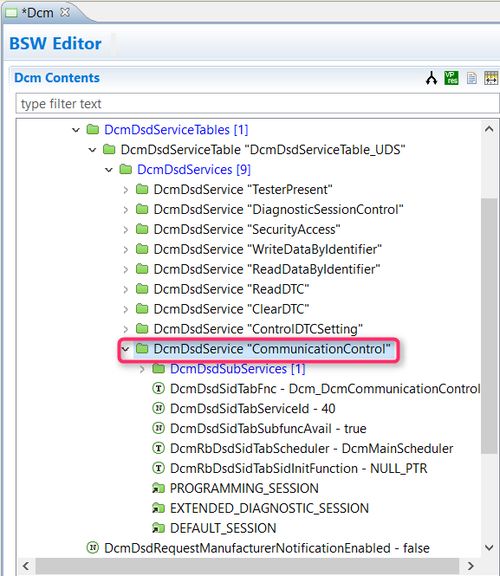
3.1 Dcm模塊配置(Dcm模塊)
在Dcm配置中,需要為0x28服務(wù)定義服務(wù)表(DcmDspService)。關(guān)鍵配置項(xiàng)包括:
- 服務(wù)標(biāo)識(shí)符:0x28。
- 會(huì)話與安全訪問控制:通常,Communication Control服務(wù)僅在非默認(rèn)會(huì)話(如擴(kuò)展會(huì)話或編程會(huì)話)下可用,并且可能需要特定的安全訪問等級(jí)。這需要在DcmDspSessionControl中關(guān)聯(lián)。
- 子功能支持:定義ECU支持的子功能列表(如0x00, 0x01, 0x02, 0x03)。
- 數(shù)據(jù)參數(shù)處理:配置對(duì)ControlType和可選CommunicationType參數(shù)的處理邏輯,包括數(shù)據(jù)長(zhǎng)度和有效性檢查。
3.2 ComM模塊集成與配置
ComM是AUTOSAR中管理網(wǎng)絡(luò)通信模式的中心模塊。0x28服務(wù)的核心邏輯往往通過調(diào)用ComM的API來實(shí)現(xiàn)。
- 通信模式管理:當(dāng)收到有效的0x28請(qǐng)求時(shí),Dcm模塊應(yīng)調(diào)用
ComM<em>RequestComMode或ComM</em>InhibitCommunication等API,通知ComM改變指定通道的通信模式(FULLCOMMUNICATION, SILENTCOMMUNICATION, NO_COMMUNICATION)。 - 通道映射配置:在ComM配置中,需明確定義網(wǎng)絡(luò)通道標(biāo)識(shí)符(如ComMChannelId)與物理通信通道(如Can控制器通道)的映射關(guān)系。這確保了0x28請(qǐng)求中的ControlType能正確映射到目標(biāo)網(wǎng)絡(luò)。
3.3 通信接口層配置(CanIf, EthIf等)
ComM的模式控制最終會(huì)傳遞到通信接口層。
- 通信控制API:CanIf、EthIf等模塊提供了
CanIf<em>Control、EthIf</em>Control等函數(shù),用于執(zhí)行具體的通信啟停操作(如禁止報(bào)文發(fā)送/接收)。 - 配置關(guān)聯(lián):需要確保ComM的通道配置與通信接口層的通道配置一致,使得控制指令能正確下達(dá)。
4. 實(shí)戰(zhàn)配置流程與示例
- 定義需求:明確ECU需要支持哪些子功能(例如,刷寫時(shí)只需禁用Tx),以及控制哪些網(wǎng)絡(luò)通道(如CAN Channel 0)。
- BSW模塊配置:
- 在Dcm配置中,啟用0x28服務(wù),綁定到擴(kuò)展會(huì)話,配置支持的子功能為0x01(禁用Tx)。
- 在ComM配置中,創(chuàng)建一個(gè)ComMChannel(例如ID=0),并將其與
CanIf/Can的ControllerRef關(guān)聯(lián)。
- 配置Dcm與ComM的交互:在Dcm代碼中,實(shí)現(xiàn)0x28服務(wù)的回調(diào)函數(shù),當(dāng)收到子功能0x01請(qǐng)求時(shí),調(diào)用
ComM<em>InhibitCommunication(0, COMM</em>INHIBIT)。
- 通信棧聯(lián)動(dòng):配置ComM,使其在進(jìn)入SILENTCOMMUNICATION模式時(shí),通過CanIf的
CanIf</em>ControlAPI,將對(duì)應(yīng)CAN控制器的發(fā)送功能禁用。
5. 注意事項(xiàng)與最佳實(shí)踐
- 會(huì)話依賴:務(wù)必正確配置會(huì)話保護(hù),避免在默認(rèn)會(huì)話下誤操作影響車輛正常通信。
- 狀態(tài)恢復(fù):當(dāng)診斷會(huì)話退出(如退回默認(rèn)會(huì)話)時(shí),應(yīng)確保通信狀態(tài)自動(dòng)恢復(fù)。這通常通過ComM的自動(dòng)狀態(tài)機(jī)管理或Dcm的會(huì)話層回調(diào)函數(shù)實(shí)現(xiàn)。
- 網(wǎng)絡(luò)管理協(xié)同:如果ECU支持AUTOSAR網(wǎng)絡(luò)管理(NM),需注意Communication Control服務(wù)與NM模式的協(xié)同,防止沖突。通常,ComM會(huì)協(xié)調(diào)NM和診斷的通信需求。
- 安全性考慮:在可能影響車輛安全功能的通道上執(zhí)行禁用操作時(shí),應(yīng)增加額外的安全訪問或預(yù)條件檢查。
###
Communication Control服務(wù)(0x28)是連接UDS診斷層與AUTOSAR通信棧的關(guān)鍵樞紐。通過精準(zhǔn)的Dcm、ComM及通信接口層配置,可以實(shí)現(xiàn)對(duì)ECU通信行為的靈活、安全控制,為診斷、編程和測(cè)試等場(chǎng)景提供堅(jiān)實(shí)基礎(chǔ)。理解各BSW模塊間的交互關(guān)系,是成功集成此服務(wù)的關(guān)鍵。